Operation Starfish: Mind & Machine Beneath the Surface
On the afternoon of July 23, 2025, during an outdoor training exercise on the Hooghly River, an NDRF Starfish sonar unit was accidentally lost in the water near the NDRF training point. The sonar system, though small, about a kilogram in weight, was a critical piece of underwater search equipment used in disaster response operations. Losing it in the vast and unpredictable Hooghly River created a search challenge that could easily be compared to finding a needle in a haystack.
The Hooghly is not an easy river to work in. Strong currents, muddy riverbeds, and extremely low underwater visibility make even basic underwater search operations difficult. During the monsoon season, these challenges intensify. Heavy rains, unstable tides, and sediment-heavy water columns reduce visibility to almost zero, forcing divers to rely on touch and instinct rather than sight.
On the evening of July 23, NDRF deep divers began their search efforts in the river. Despite their experience and determination, the conditions proved extremely demanding. With such a small target somewhere within a vast stretch of riverbed, the key to success would not just be effort, it would be precision. Before divers could focus their search, the target area needed to be narrowed down.
This was where marine robotics and sonar technology became essential.
To support the operation, NDRF integrated Banergy’s autonomous marine robotics systems into the search effort. The goal was not to replace the divers leading the recovery, but to use advanced sonar imaging and autonomous surface vehicles to help the team identify a focused search area in the river.
Late that night, the Banergy team arrived to assist with the technology deployment. River conditions were studied carefully, weather patterns, water depth, and tidal behavior were all analyzed to determine the best window for search operations. By early morning on July 24, the teams had assembled at the Hooghly River ferry ghat, preparing for what would be a technically demanding underwater localization effort.
The conditions were far from ideal. A severe thunderstorm had passed through the area overnight, and rainfall had increased the river’s flow significantly. Water depth in the operational area measured nearly twelve meters, and the current speed reached approximately three meters per second. In such conditions, maintaining precise positioning in the water becomes extremely difficult for divers and support vessels alike.
Despite the challenges, the NDRF response teams prepared to resume the search.
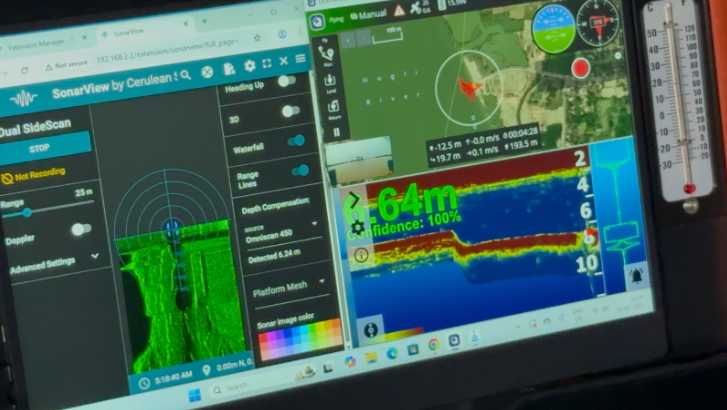
To assist the effort, Banergy deployed its Unmanned Surface Vehicle (USV), known by the call sign Pillar of Autumn. Unlike diver-based searches that depend heavily on physical exploration, the USV platform operates from the surface while using integrated sonar systems and geospatial positioning to map underwater structures and anomalies. These marine robotics systems are specifically designed to support underwater search operations in environments where visibility and current conditions limit conventional approaches.
As the USV began scanning the riverbed using multiple sonar systems, acoustic imaging started to reveal structural shapes beneath the sediment-heavy waters. Sonar mapping quickly helped identify potential objects and irregularities on the river floor, allowing the team to reduce the search area significantly.
Within minutes, the target zone was narrowed down to roughly a hundred-meter radius.
Further sonar passes provided additional detail. The system identified the presence of a submerged structure—a sunken vessel approximately thirteen meters in length resting on the riverbed at around eleven meters depth. The vessel was positioned roughly thirty meters from the shoreline and oriented perpendicular to the river’s current.
This discovery was immediately communicated to the NDRF incident commander.
The possibility emerged that the lost Starfish sonar unit could have become entangled within the structure of the submerged vessel. With this new information, the operation shifted from a broad-area search into a focused underwater recovery effort.
While NDRF divers prepared to re-enter the water using inflatable rescue boats, the USV continued its sonar-assisted scanning to refine the search location. By analyzing the vessel’s orientation, exact distance from shore, and surrounding riverbed contours, the system was able to reduce the target search radius even further.
Operating in loiter mode, the USV maintained a stable position over the suspected site, narrowing the search zone to approximately fifteen meters. This precise localization provided the divers with a clear starting point for their underwater search.
Throughout the operation, the marine robotics system remained active, continuously monitoring the area with surface cameras and sonar sensors. Real-time data from the USV was transmitted to the NDRF operations office, where officers and engineers observed the sonar feeds and positional data on the Banergy surface command system.
With a defined search zone established, NDRF divers began their systematic underwater sweep.
The river conditions remained challenging. Visibility was nearly nonexistent, currents continued to push against divers, and the muddy riverbed made movement slow and difficult. Yet the narrowed search area allowed the divers to focus their efforts with much greater efficiency.
After hours of intense searching, the first breakthrough came.
Around 9:30 in the morning, divers located traces of the sonar’s connecting wire beneath the water. The discovery confirmed that the search had reached the correct location.
One hour later, at approximately 10:30 a.m., the lost Starfish sonar unit was successfully recovered from the Hooghly River.
What began as a nearly impossible search had turned into a precise underwater recovery effort through the combined strength of human skill and advanced marine technology.
Operation Starfish stands as an example of how modern underwater search operations are evolving in India. In challenging environments like the Hooghly River—where strong currents, sediment-heavy waters, and monsoon conditions complicate every dive—marine robotics systems such as autonomous surface vehicles and sonar imaging platforms can dramatically improve operational precision.
Yet technology alone does not complete missions.
The success of the operation ultimately rested on the expertise, discipline, and persistence of the NDRF teams who carried out the underwater search and recovery. The marine robotics systems operated quietly in the background—mapping the riverbed, identifying structural anomalies, and guiding the search zone—while the divers performed the demanding task of locating and retrieving the equipment.
Operation Starfish highlighted the strength of collaboration between human expertise and advanced engineering. When skilled response teams are supported by precise underwater robotics and sonar technology, even the most difficult search operations can be brought to a successful conclusion.
In the end, it was a reminder that in modern disaster response and underwater operations, the greatest results are achieved when human determination meets the power of intelligent machines.
Man and machine, working together in the river’s current, turning an impossible search into a successful recovery.


28th July 2025
.jpeg)



.jpeg)
.jpeg)







